| O projeto Raspode consiste na construção de um robô hexapode capaz de se locomover em diferentes tipos de terreno, desviando de obstáculos e se adaptando a diferentes tipos de ambientes. Com o estudo de estabilidade e diferentes movimentações, o raspode está sendo desenvolvido para alcançar areas de difícil mobilidade para o ser humano, gerando relatórios de condições de terreno e localização de pessoas. Para tal objetivo, o projeto MapVision orienta a sua movimentação, além de realizar a detecção de vítimas nos locais de utilização. |
Materiais
18 - Servo Motor
01 - Raspberry Pi 3
02 - PCA9685
01 - Bateria 12V
02 - Regulador de tensão 5V
Funcionamento detalhado do Raspode
|
Um robô hexápode é um dispositivo mecânico com a estrutura similar à de um inseto que anda sobre seis patas,
com intuito de promover uma maior locomoção e flexibilidade, é equipado com sensores e atuadores que permitem o mesmo se locomover em diversas superfícies e desviar de possíveis obstáculos.
O Raspode será capaz de locomover-se com três graus de liberdade e utilizará servomotores para o controle de cada uma de suas articulações. Cada pata articulada possuirá três servomotores, controlados por um micro controlador distribuídos nos seguimentos tíbia, coxa e fêmur. A locomoção do Raspode pode ser dividida em locomoção dinâmica, como correr e locomoção estável, como andar. |
RAS CHAPTER INITIATIVE GRANT
| O projeto Raspode recebeu, no final de 2021, um financiamento de $1000 do RAS CHAPTER INITIATIVE GRANT! Esse é o segundo financiamento da RAS Cimatec. Em 2020, o projeto BAYIEEEMAX foi contemplado com o valor máximo de $2000. |


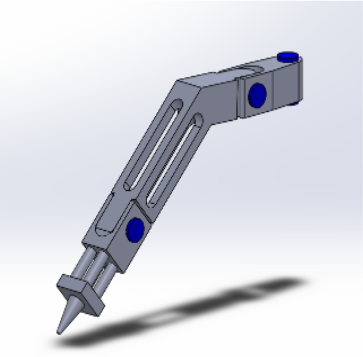
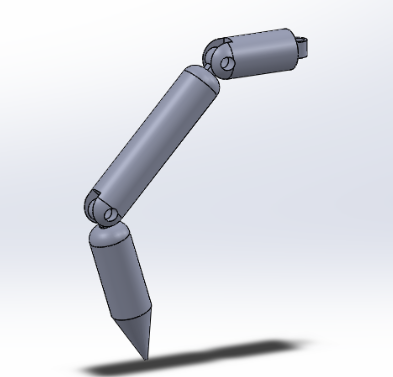
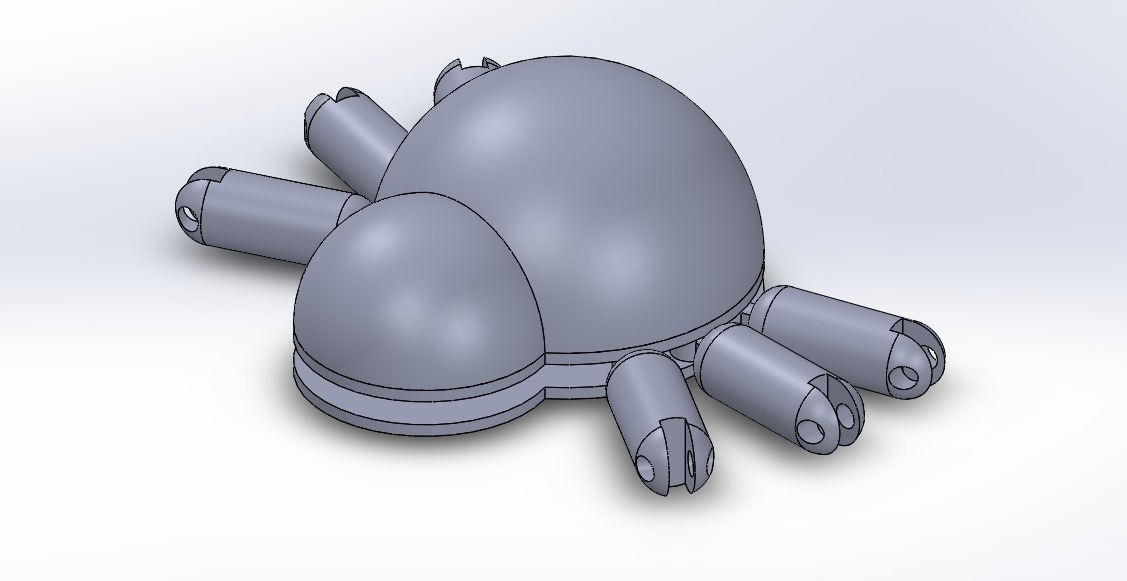
Modelagem
| As imagens abaixo representam as visões iniciais do modelo CAD das patas do hexápode, as quais serão confeccionadas através de uma impressora 3D. O primeiro modelo traz uma visão do raspode com estruturas em sua maioria composta por ângulos mais retos, a fim de apropriar a estética robótica ao projeto. A opção das ranhuras ao longo da peça, foi feita visando o encaixe do servo motor, possibilitando a passagem dos fios de forma mais fácil. |
Autor
Tayron Rodrigues
Vice-Presidente - Gestão 2021
Postado em: 29/01/2022