Projetos
01/08/2021
|
O micromouse surge da necessidade de criar um robô para a competição MicroRAS, seja ele capaz de
solucionar problemas envolvendo labirintos. O robô deve ser capaz de se mover em qualquer direção, e como método de orientação o
robô deve usar as paredes que ele encontrará ao seu redor.
|
Introdução
|
Os robôs micromouse são dispositivos de baixo
custo desenvolvidas para solucionar desafios de
labirinto. Este artigo visa desenvolver um
micromouse utilizando o Arduino Nano como
plataforma, com intuito de solucionar desafios
envolvendo labirintos e através disso introduzir
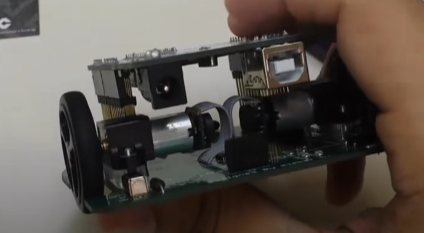
estudantes na robótica. Na imagem abaixo é mostrada um dos robôs
que foram utilizados como inspiração para este projeto.
|
Materiais
01 - Arduino Nano
04 - Sensor reflexivo
01 - Switch
02 - Motor de passo
02 - SI - ULN2003
01 - PCI perfurada 7x10cm
Funcionamento
|
Robôs micromouse como este utilizado
pela MazeEscape são robôs seguidores de
parede, estes ganham esta nomenclatura por utilizar sensores para detectar paredes e se orientar com base nelas.
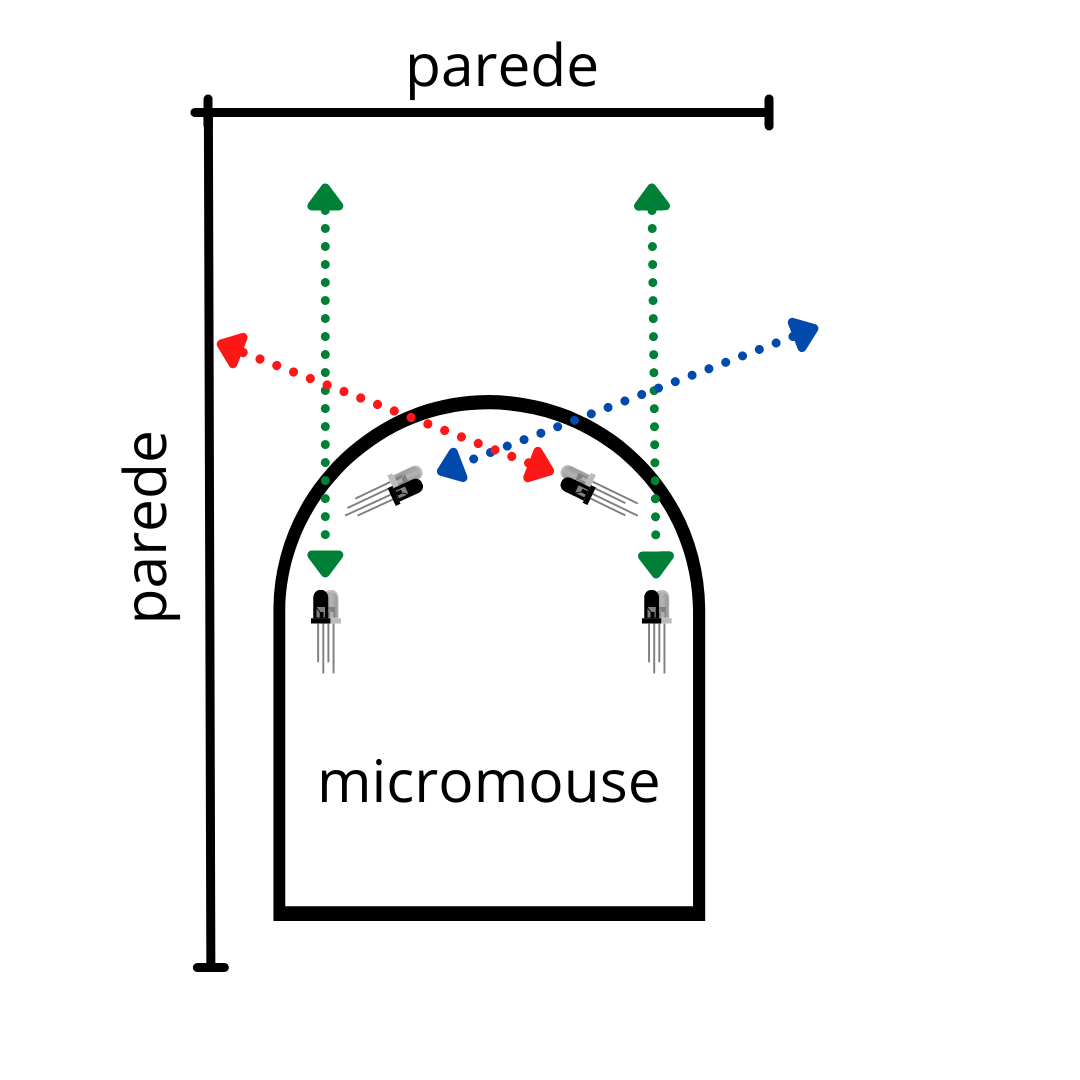
No caso do nosso projeto será utilizado sensores reflexivos(infravermelho). O esquema de disposição dos sensores
é o seguinte:
|
Disposição dos sensores infravermelho.
Dispositivos utilizados
Arduino nano
|
É uma placa de prototipagem de tamanho reduzido que tem como função realizar o controle do Micromouse, recebendo dados dos sensores e mandando dados para o motor.
|
Sensores reflexivos
|
São sensores que detectam a presença de obstáculos. Os sensores utilizam um receptor e emissor infra-vermelho e eles fazem essa detecção.
|
Motor de passo
|
Esse tipo de motor permite o controle da posição em conjunto com o uln2003
|
Desenvolvimento da PCB
|
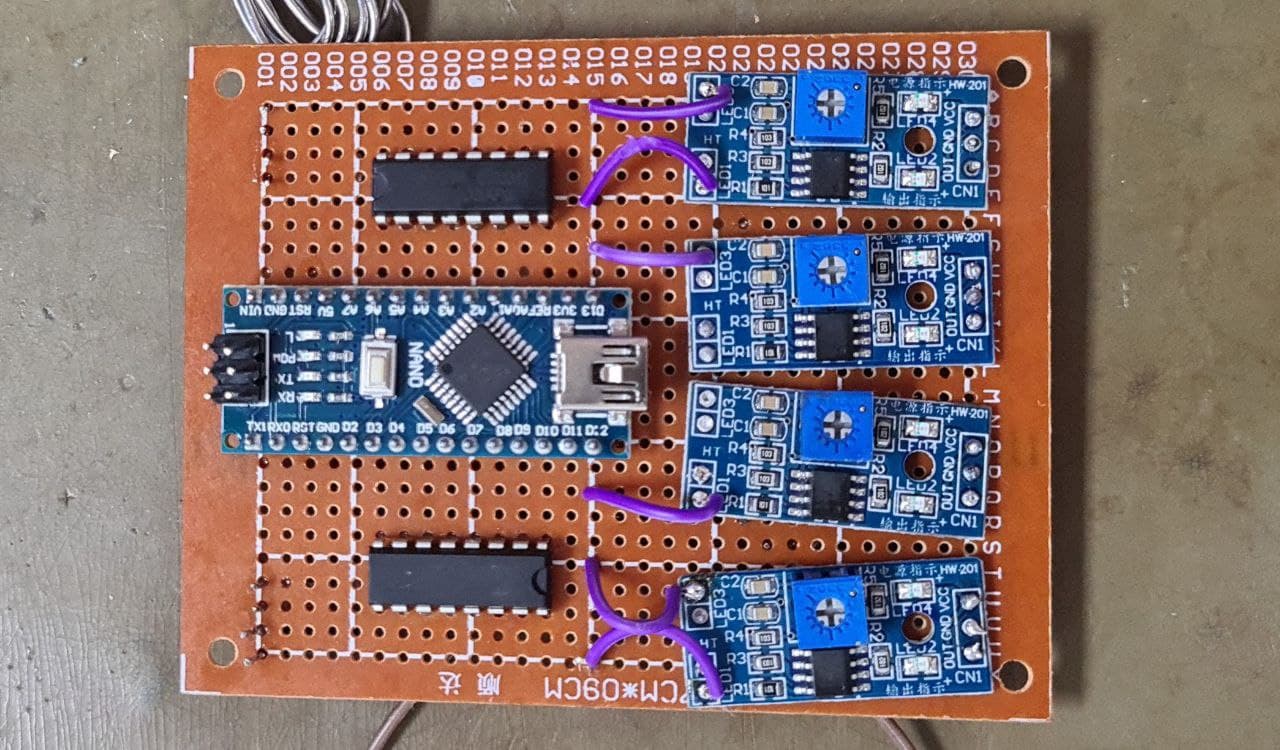
A placa de circuito impresso que será responsável por realizar as conexões entre os sensores e o microcontrolador se
encontra na imagem abaixo, por enquanto ela está em desenvolvimento e somente um dos motores está conectado para realizar alguns testes.
|
Primeira versão da PCB do micromouse.

Autores
João Vitor Silva Mendes
Estudante de Engenharia Elétrica
Tiago Barreto
Estudante de Engenharia Elétrica